Overview
Underwater mapping built around acquisition, visualization, and integration.
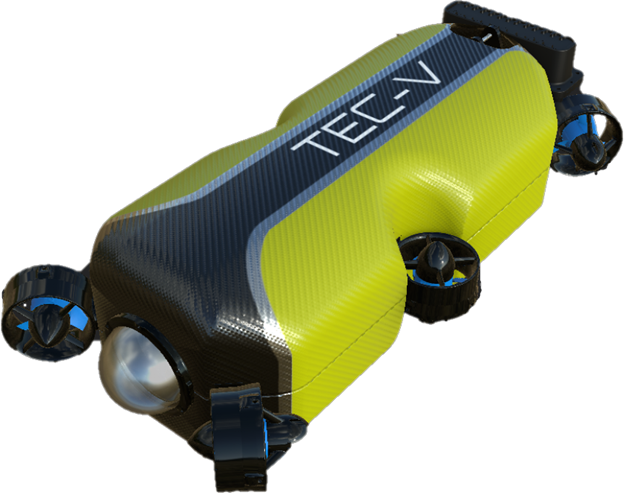
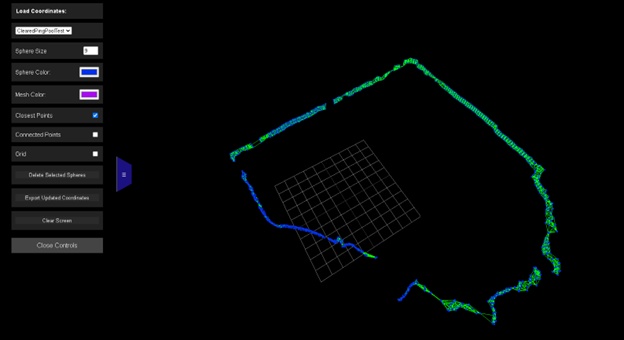
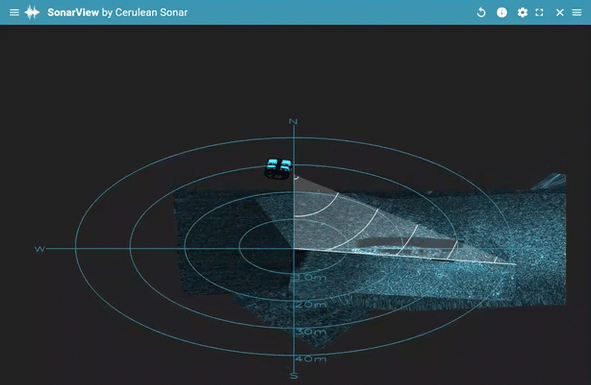
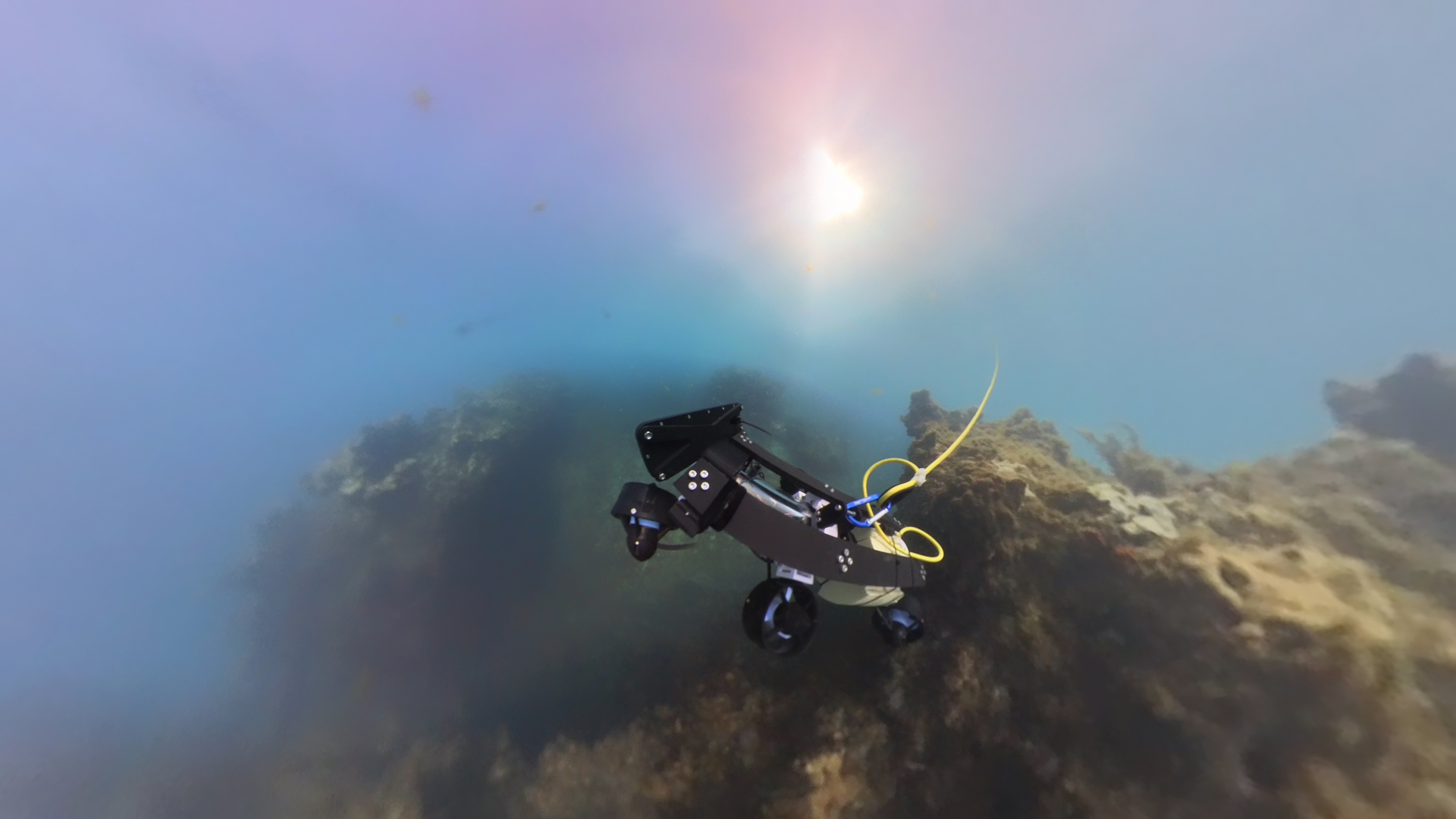
TEC-V is an ROV designed for submerged cave mapping and navigation. The platform integrates an Omniscan sonar with a custom underwater vehicle, a data pipeline for ingesting raw scan data, and an interactive 3D point-cloud “Cloud Plot” viewer for exploration and analysis.
My focus was on data ingestion, the visualization interface, and the system integration and testing required to move from raw sonar capture to usable spatial output.
- Software stack: Python for sonar acquisition and transformation, Java for 3D visualization and UI, plus supporting web presentation.
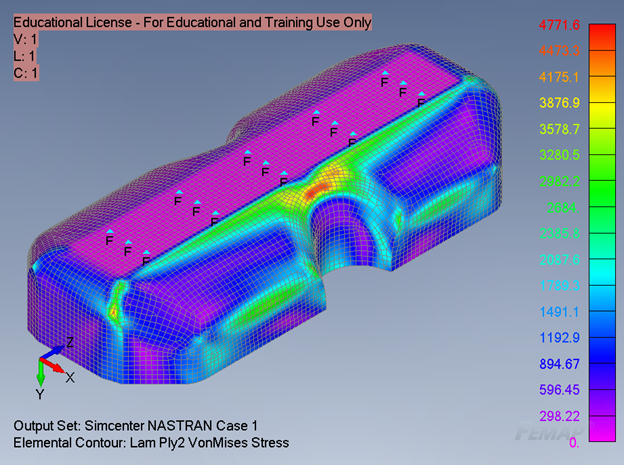
- Hardware: Omniscan 450 FS sonar with custom mounting designed around hydrodynamics and stable scan collection.
- Validation: Gazebo simulation and pool/tank testing before broader deployment.